|
|
The 3DOF helicopter simulator, which has 3 degrees of freedom in rotation, is a new educational product developed by Googol Technology. It is not only of great value in the field of aviation and space flight research but also ideal to evaluate feedback strategies, such as PID, LQR, H infinity, fuzzy, neural net - any one you wish to implement. As one of the newly recommended products, its hardware system is matched with a textbook which covers classical control, modern control and dynamic modeling experiments in details, so it offers the students and researchers in the fields of automation and mechatronics a unique opportunity to control the pitch and yaw of a simplified helicopter.
Main Features:
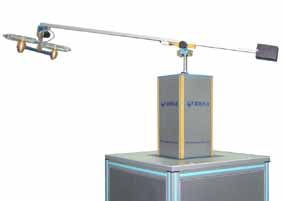
The 3DOF helicopter simulator consists of a pedestal upon which a long arm is mounted. The arm carries the "helicopter body" on one end and a counterweight on the other. The arm can also tilt about an "elevation" axis as well as swivel about a vertical (travel) axis. Optical encoders mounted on these axes allow for measuring the elevation and travel of the arm. The helicopter body mounted at the end of the arm is free to pitch around the "pitch" axis. The pitch angle is measured via a third encoder. Two motors with propellers mounted on the helicopter body can generate a force proportional to the voltage applied to the motors. The force generated by the propellers causes the helicopter body to lift off the ground. The counterweight can reduce the power requirements on the motors; it is adjusted so that the effective mass of the body is proper. All electrical signals to and from the arm are transmitted via a slip-ring in order to eliminate the possibility of tangled wires and reduce the amount of friction.
- Hardware platform based on PC and DSP-based motion controller.
- Experimental entity platform provided for the major of aviation.
- Comprehensive experiment kit, covering the dynamic modeling, classic control experiment, modern control experiment, optimized control experiment and intelligent control experiments. Users can select relevant algorithm for the experiment and teaching needs of various courses.
Applicable Courses:
1. Mechanical control engineering
2. Automatic control principle
3. Modern control engineering
4. Linear control system
5. Computer control system
|